
Paper Review | Reducing Object Detection Uncertainty in UAVs
Full paper title: Reducing Object Detection Uncertainty from RGB and Thermal Data for UAV Outdoor Surveillance (Aug 21 2023)

Disclaimer, I am an investor in Drone Delivery Canada and have the conviction that autonomous UAV technology can be used to benefit humanity.
However, you might have seen the war footage from Ukraine where UAVs drop grenades on unsuspecting soldiers cowering in their trenches. Therefore I know that UAVs can be used to kill and maim people in the most haunting way possible.
I also have seen the dystopian scenarios of drones performing crowd-control and face-recognizing people from the anonymity of an inhumane flying object.
Despite all of these real-world nightmares, I believe there are use cases for autonomous UAVs that could really help humanity. This paper is an example of that.
When I select a paper for review, real-world applicability and a true benefit to humanity are always criteria that I take into consideration.
Why is this paper interesting? People get lost all the time, need life-saving medicine urgently, or need help during a major catastrophe like the one that happened in Lahaina Hawaii in August 2023. The project team provides a framework that has the potential to help people in need quickly, reliably, and inexpensively.
More importantly, if the UAV is able to perform the task fully autonomously without a human operator, then the search activity could be done for much longer and without any physical and psychological stress to the human operator.
But let’s dive into it, shall we?
Project goal: Improve the autonomous detection performance of UAVs to find missing people faster and more reliable
Problem: A hiker goes missing or has a medical emergency in a large rural area. How can we find the actual missing/injured person in the shortest amount of time?
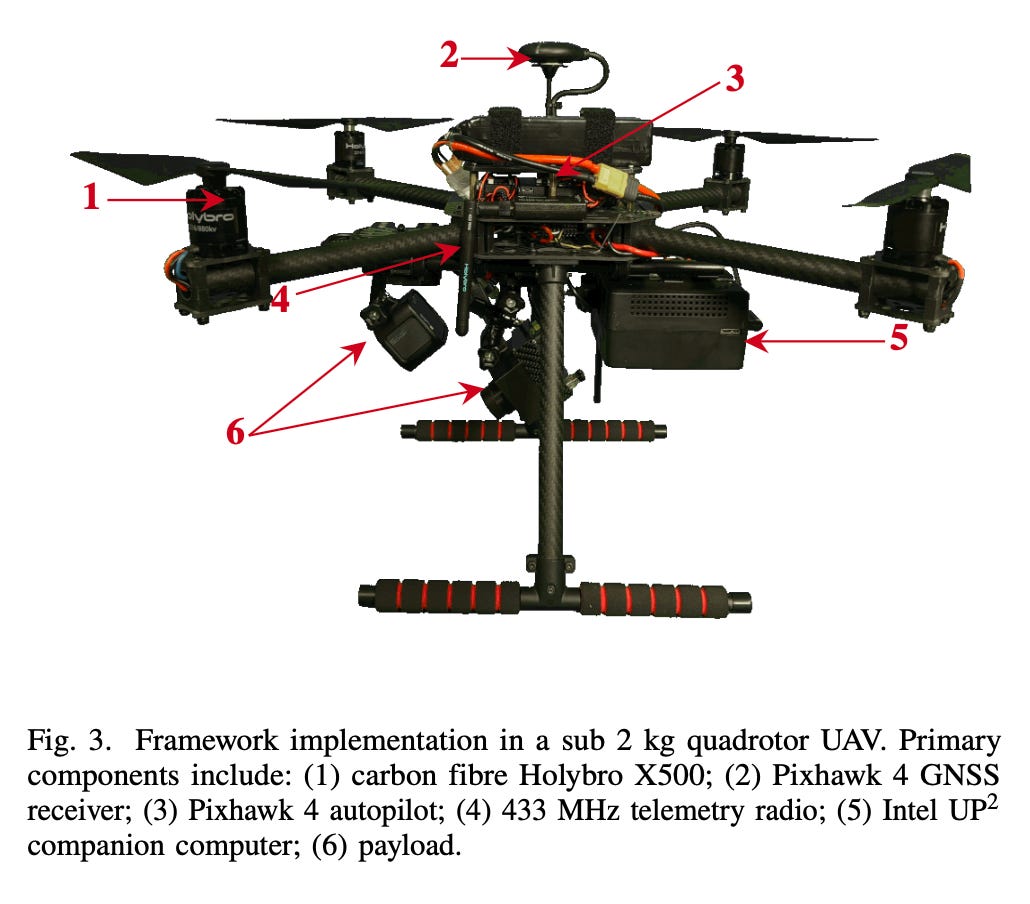
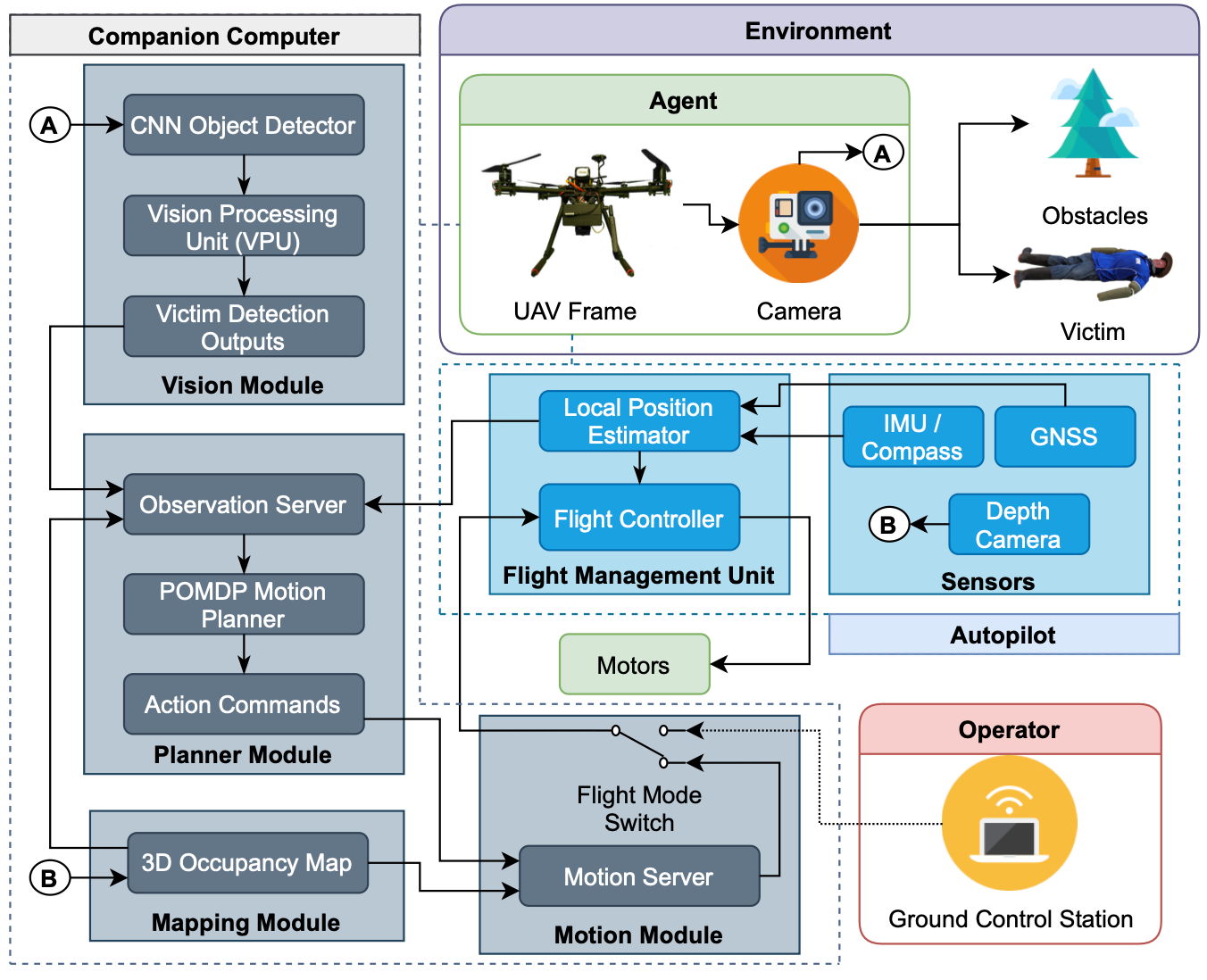
Proposed Solution: The project team combines a standard Holybro X500 UAV with a GoPro and an “AI brain” to improve search path planning and object detection. This “brain” consists of a vision module that runs a convolutional neural network object detector with the help of a Vision Processing Unit. A planner module that employs a Partially observable Markov decision process to instruct the motion server with action commands. And a mapping module that defines trajectories over a 3D occupancy map.
Opinion: The project team's approach employs a novel and intuitive approach that provides promising results. If more than thousands of people go missing every year in the American wilderness, a solution like this could significantly improve discovery and provide assistance.
The project does not have a website. Nor is the source code published on GitHub (7/10).
Source : https://arxiv.org/pdf/2308.10671.pdf - page 3
Let’s dive in